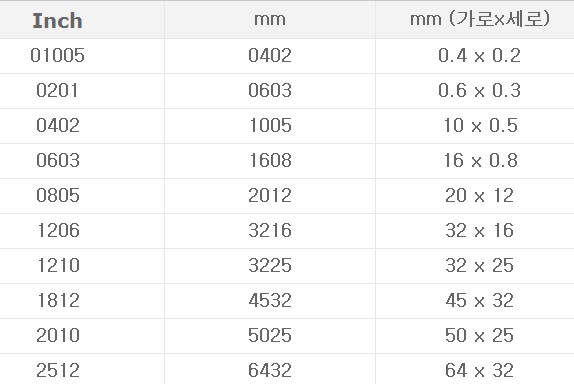
풋프린트 선정
1.트랜지스터(npn,pnp,JFET 등): TO92
2.다이오드(제너 포함):DO35
3.IC(8,14,16핀짜리): DIP(핀갯수)_3
EX)8핀 IC=DIP8_3
4.정전압 IC: TO220AB
5.저항,R: RES400
6.가변저항: RESADJ
7.콘텐서(극성없음/있음):CAPCK05/CAP196
8.LED: CAP196(극성있는 콘데서와 같다.)
9.CON2/스위치(2핀짜리): JUMPER2
10.CON(3,4,5 등): JUMPER(3,4,5)
https://m.blog.naver.com/PostView.nhn?blogId=junyoung8934&logNo=220393220042&proxyReferer=https%3A%2F%2Fwww.google.co.kr%2F
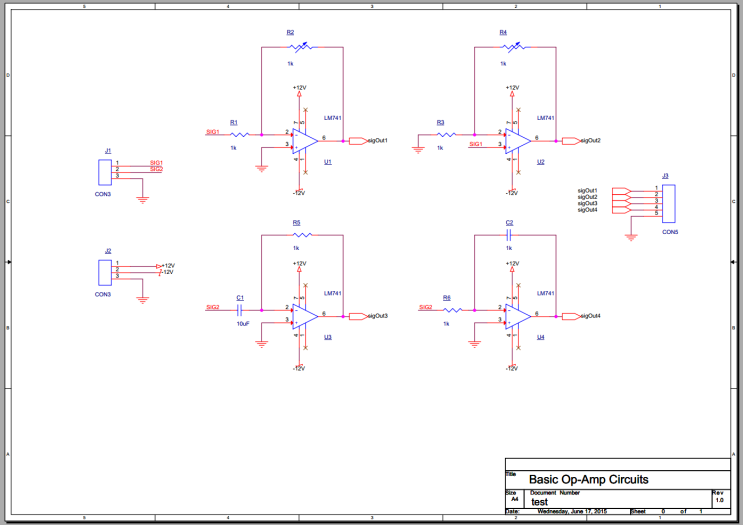
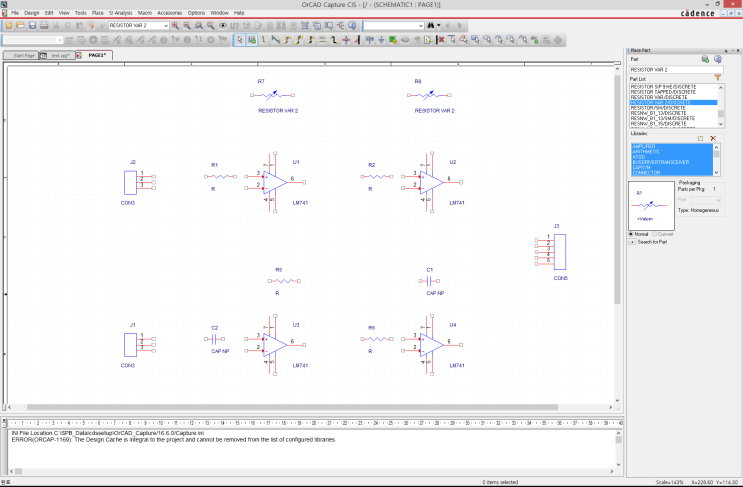
OrCAD 16.6 이용하여 전자캐드 기능사 실기 평가와 유사한 형태의 회로 설계 진행
그리고자 하는 opamp 기본 구동 회로
- 진행 순서
1) Project 만들기
OrCAD Capture 실행 -> 'File' -> 'New' -> 'Project...' 선택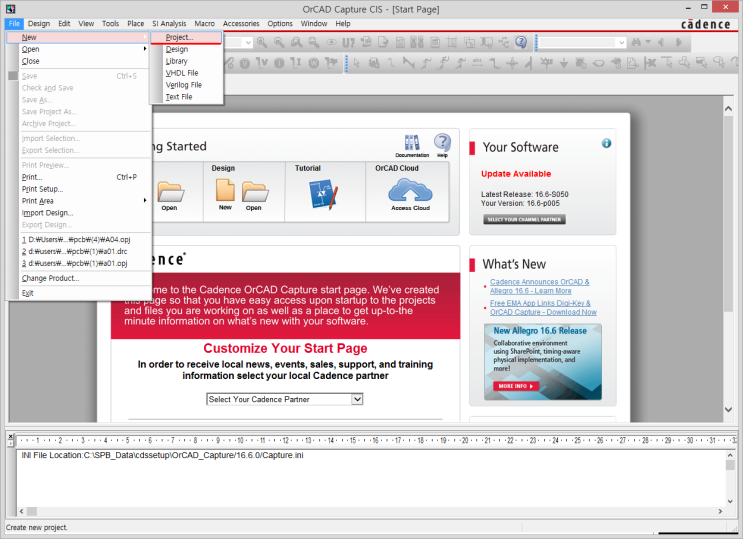
'Name' -> 생성할 프로젝트명 입력,
'Create a New Project Using' -> 'Schematic' 선택,
'Location' -> 생성할 프로젝트 경로 입력 -> 'OK' 선택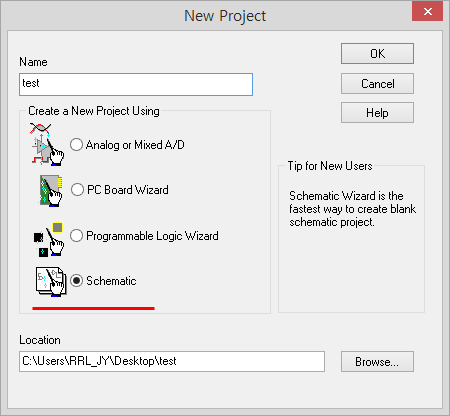
2) 환경 설정
'Options' -> 'Schematic Page Properties...' 선택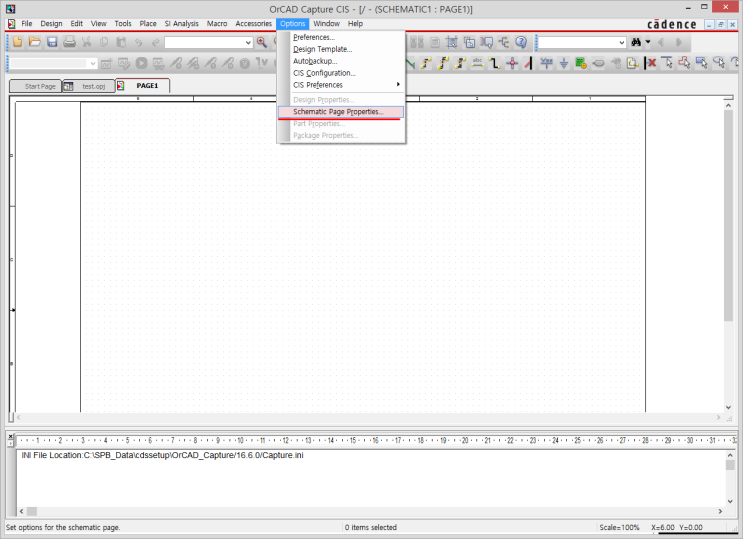
'Units' -> 'Millimeters' 선택,
'New page Size' -> 'A4' -> '확인' 선택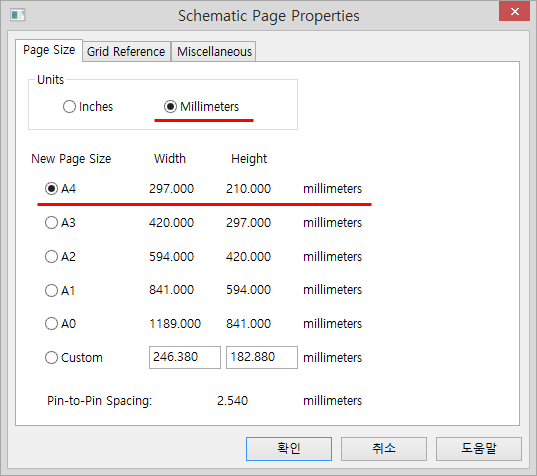
3) Title Block 작성
도면 우측 하단의 '<Title>' 우클릭 -> 'Edit Properties...' 선택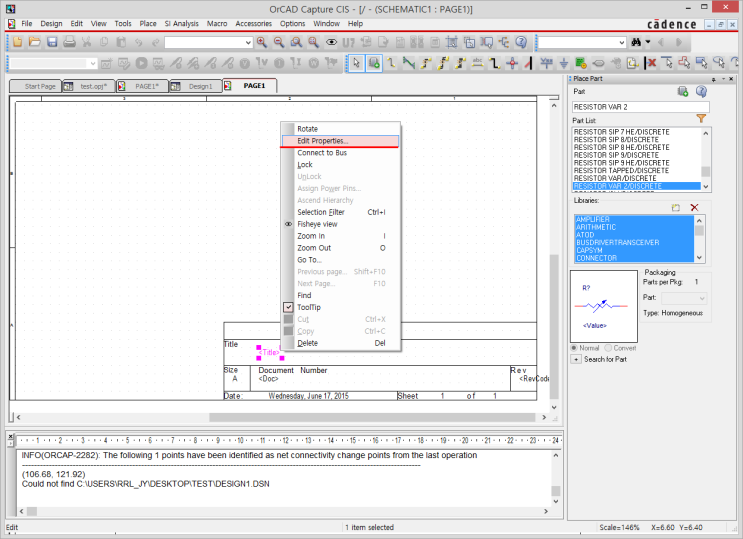
'Value:' -> 제목 입력 ,
'Font' -> 'Change' 선택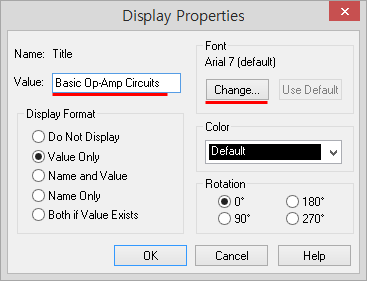
'크기' 수정 -> '확인' 선택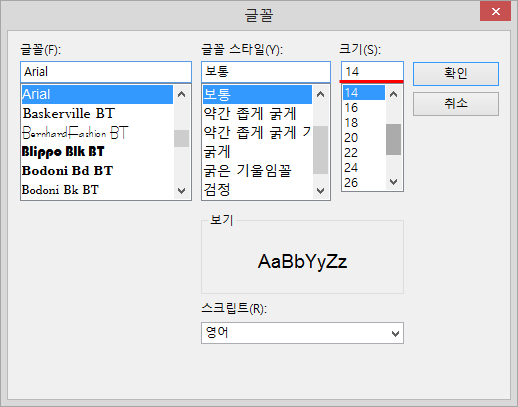
'Document Number', 'Rev' 위와 동일하게 내용 입력 및 수정 -> 메뉴바 'Snap To grid' 선택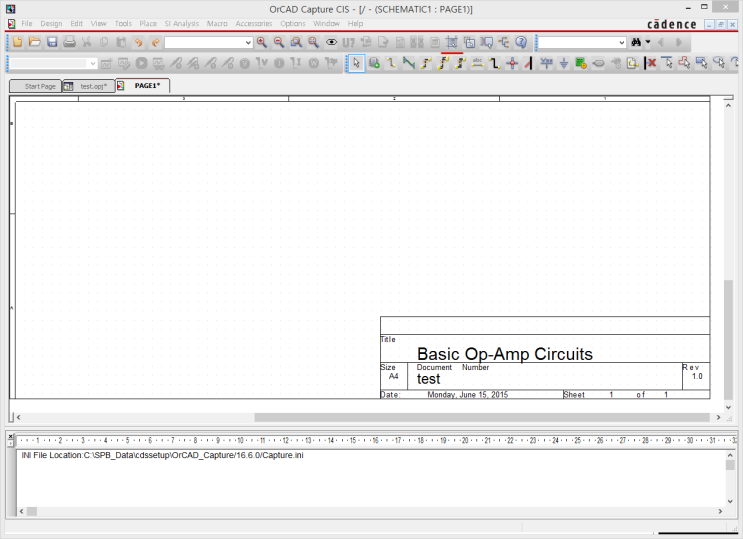
'Title', 'Document Number', 'Rev' 드래그하여 위치 이동 -> 메뉴바 'Snap To Grid' 선택하여 원래 상태로 돌림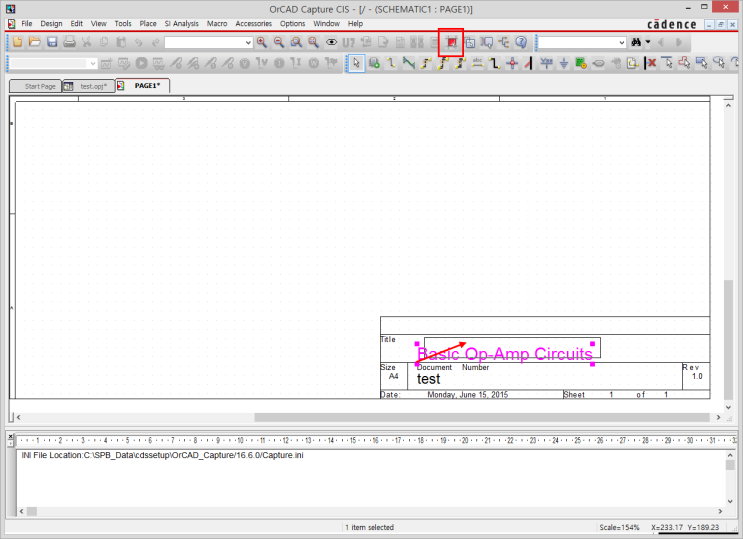
4) 부품 배치
'Place' -> 'Part...' 선택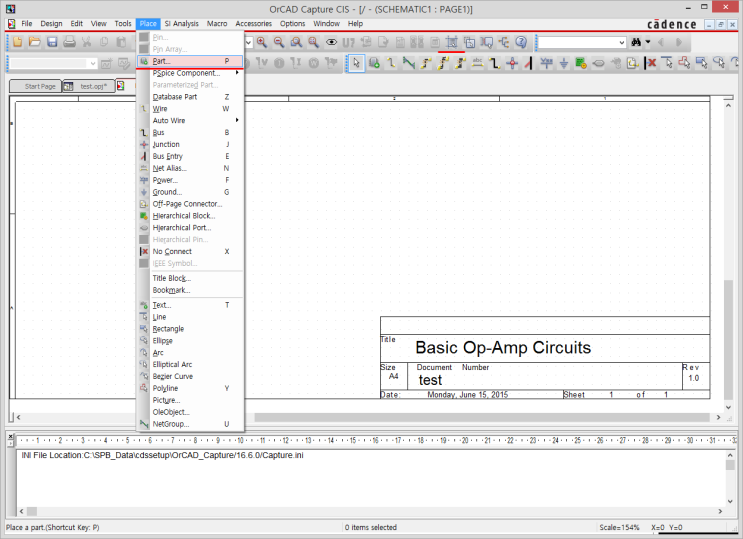
우측의 'Place Part' -> 'Libraries:' -> 'Add Library' 선택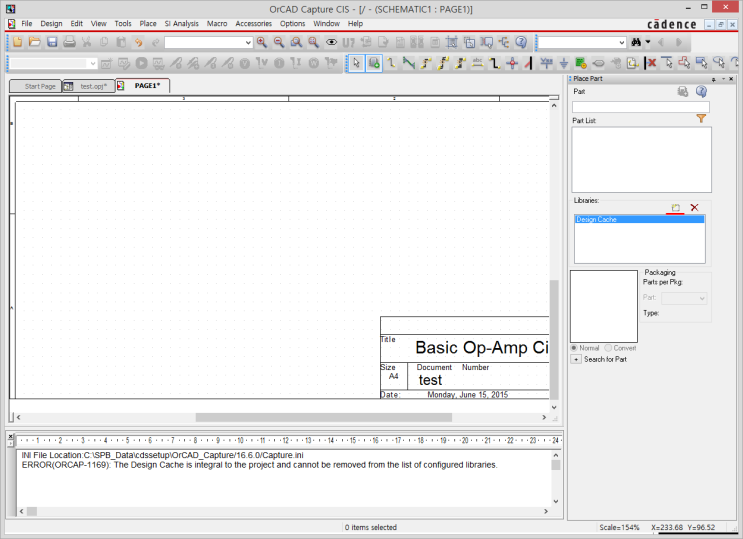
'library' 폴더내의 전 폴더 및 파일 선택 -> '열기' 선택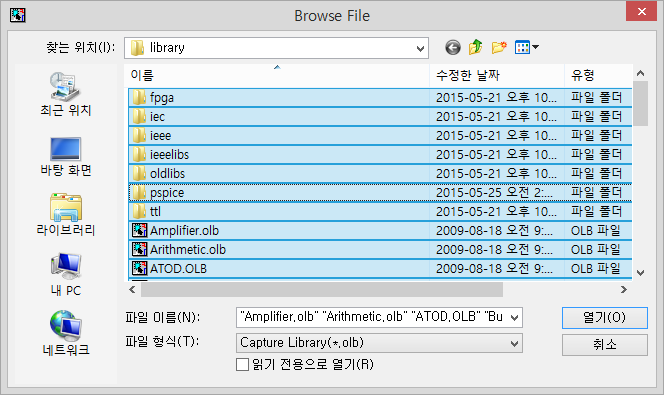
'Place Part' -> 'Part'에서 원하는 부품명 입력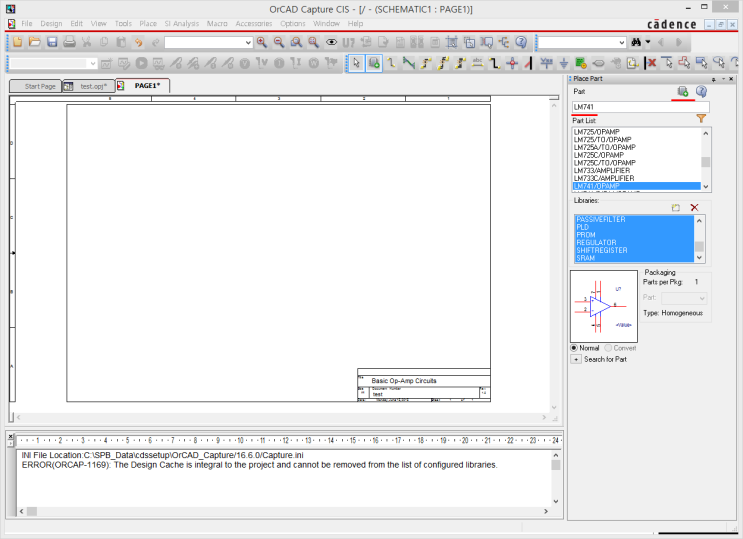
도면에 부품 위치 시킴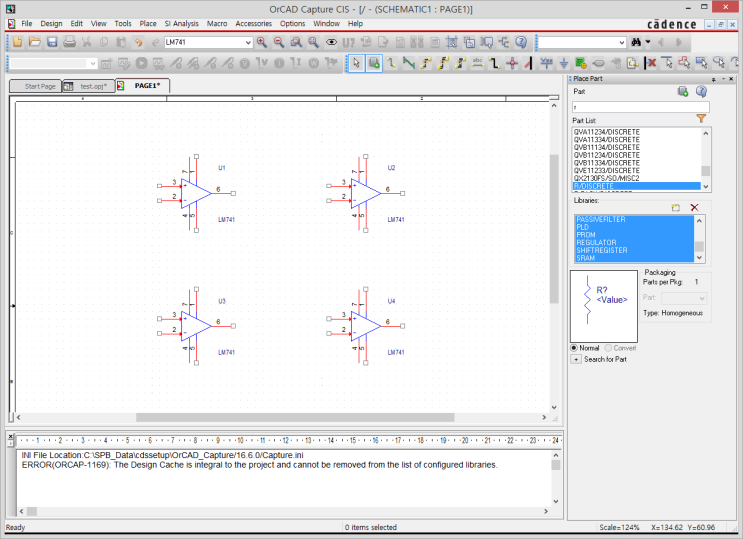
'Place' -> 'Power...' 선택하여 전원 추가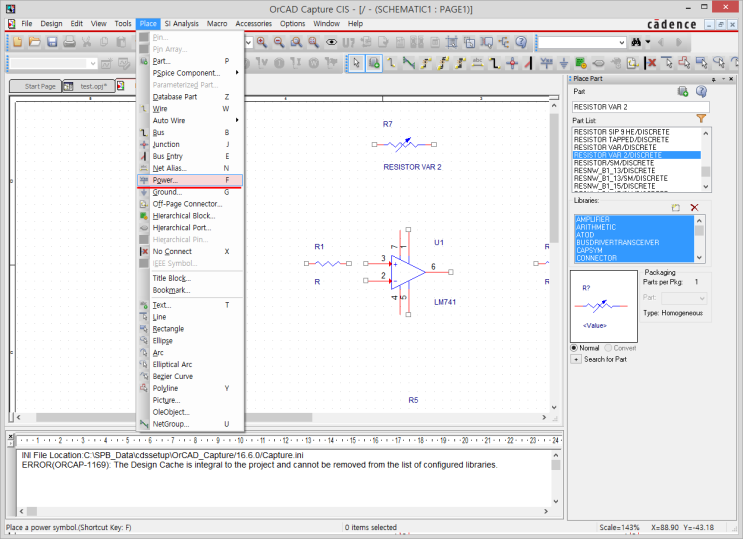
'Name' -> 원하는 전원 value 입력 -> 'OK' 선택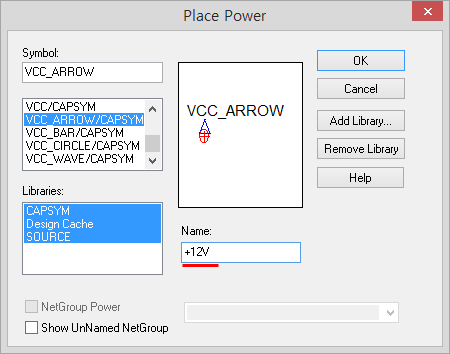
'Place' -> 'Ground...' 선택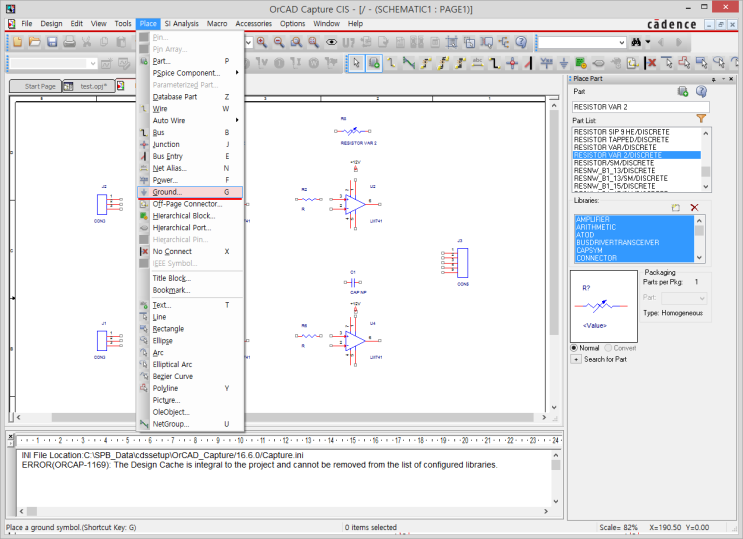
'GND' 선택 -> 'OK' 선택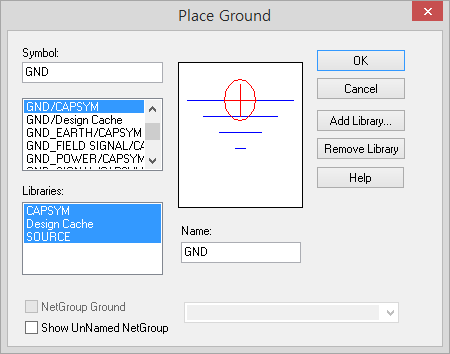
핀 수정 위해 'LM741' 우클릭 -> 'Edit Part' 선택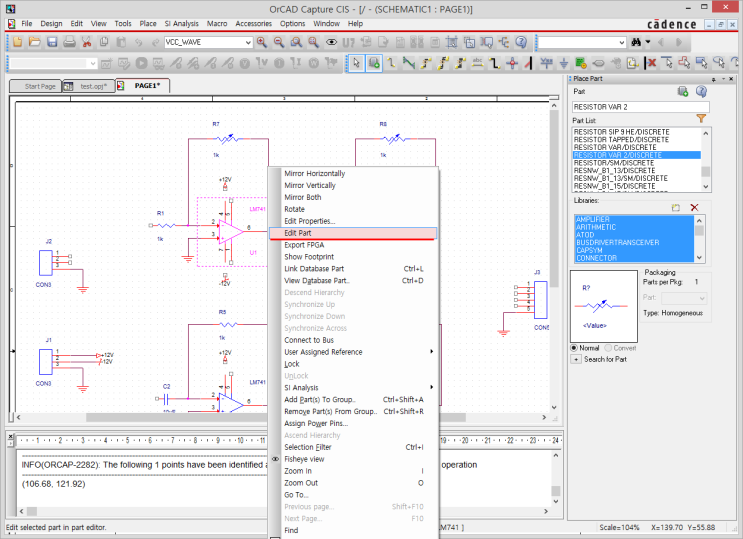
수정하기 전의 핀 배치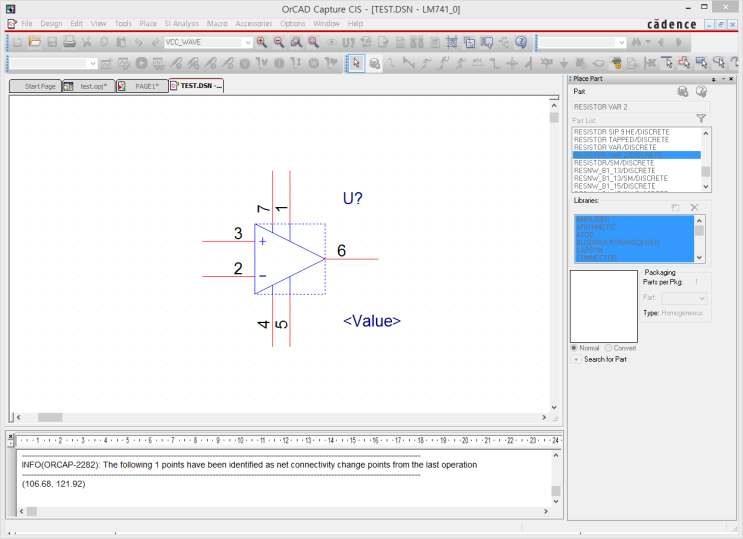
4번, 7번 핀 드래그하여 위치 변경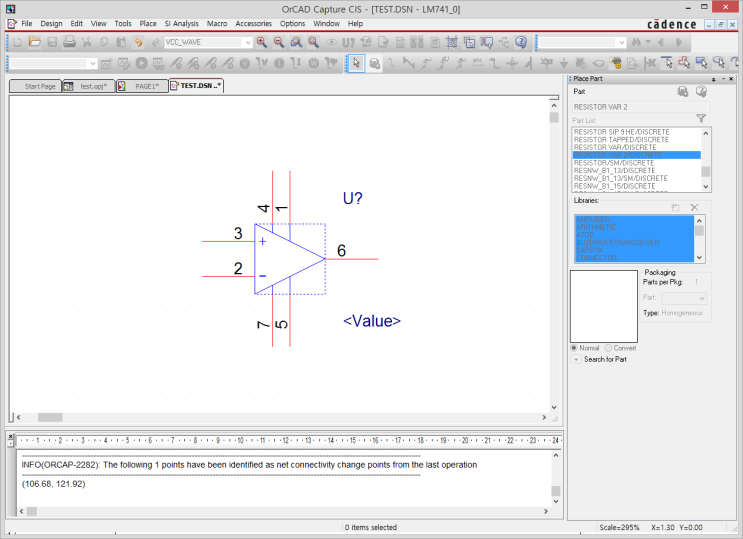
'*.DSN' 탭 우클릭 -> 'Close' 선택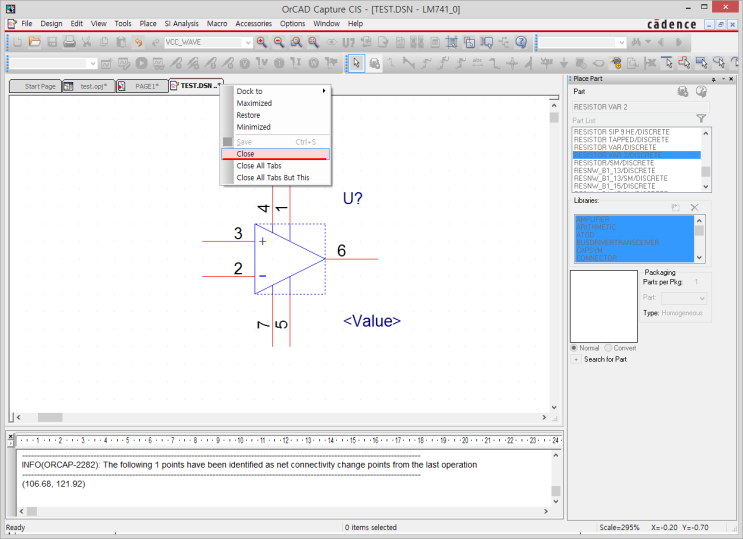
'Update All' 선택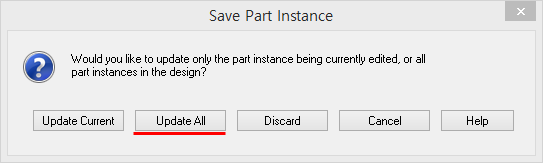
5) 배선 작업
LM741의 패키지 형태, 본 회로에서 1, 5번핀 기능은 사용하지 않아 이를 처리해줌
(8번 핀의 NC는 이후 Footprint 과정에서 작업)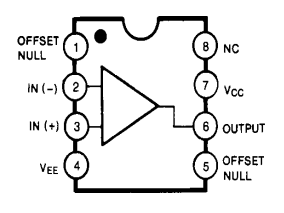
'Place' -> 'No Connect' 선택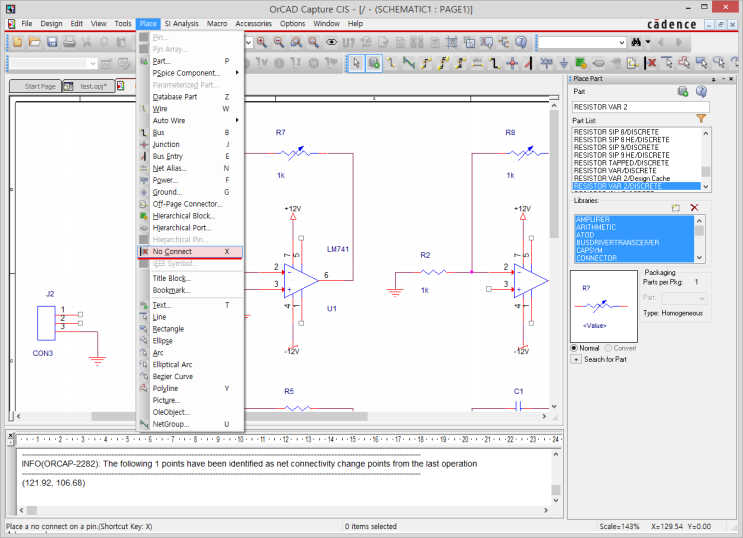
LM741의 1번, 5번 핀 선택하여 아래와 같이 작업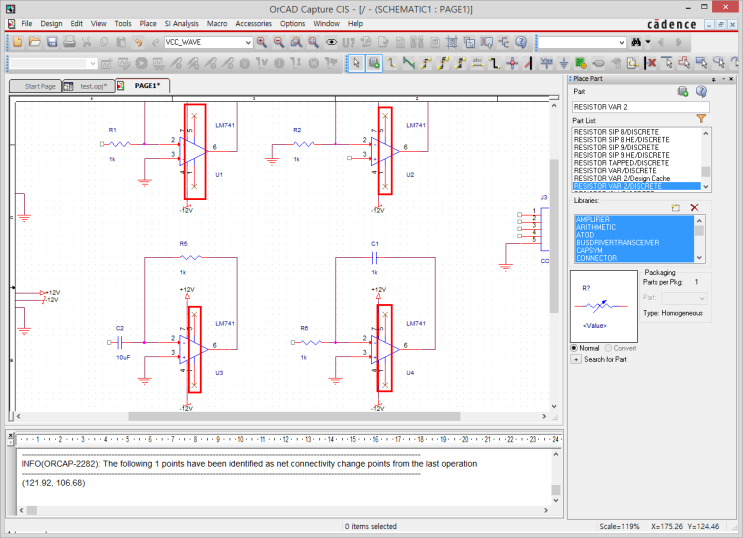
'Place' -> 'Net Alias...' 선택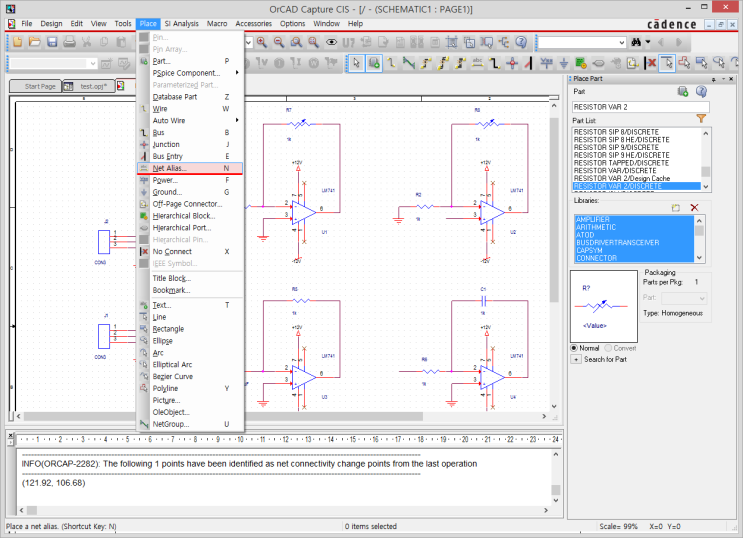
'Alias:' -> net 이름 입력 -> 'OK' 선택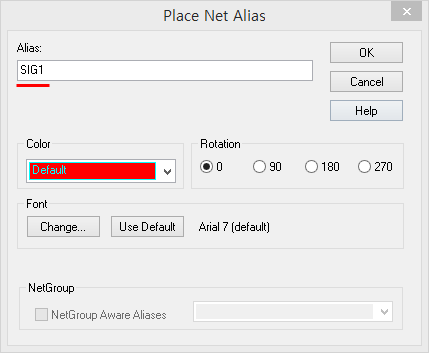
아래와 같이 연결하고자 하는 net 위에 클릭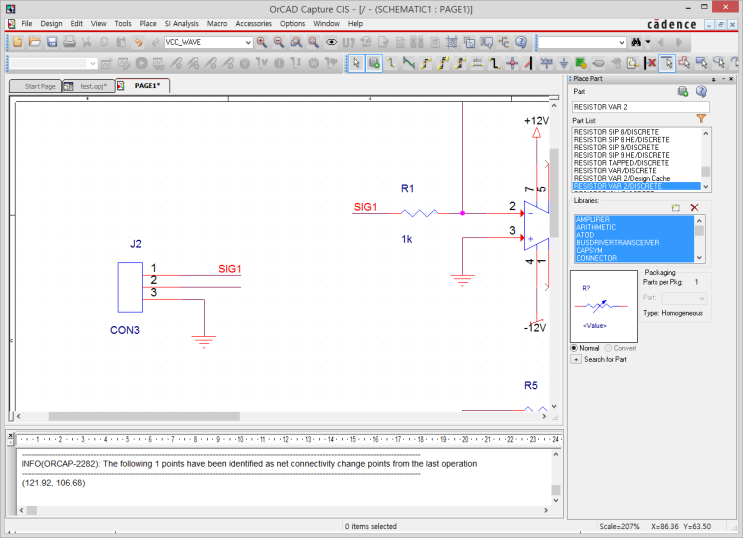
'Place' -> 'Hierarchical Port...' 선택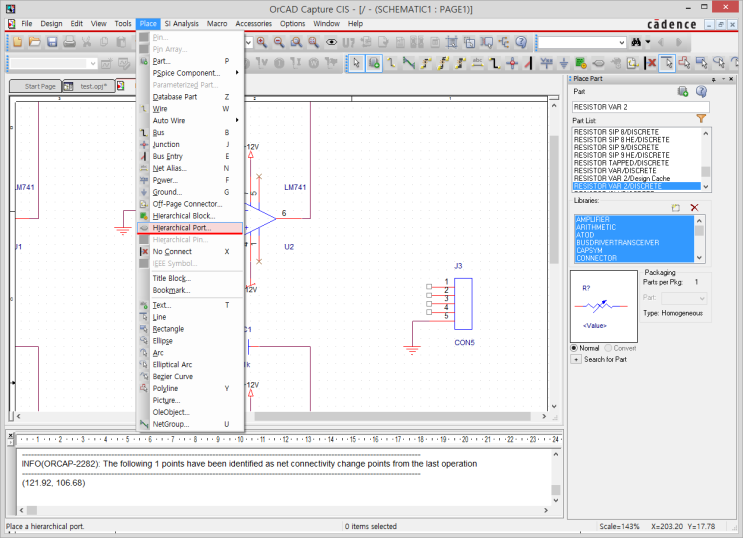
'Symbol:' -> 'PORTLEFT-R' 선택 -> 'Name' -> port 이름 입력 -> 'OK' 선택 -> net 위에 클릭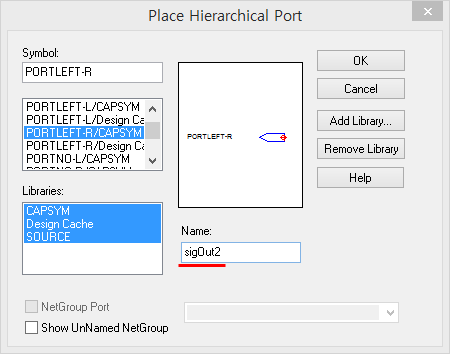
위와 동일하게 'PORTLEFT-L' 선택 -> 'NAME' -> port 이름 입력 -> 'OK' 선택 -> net 위에 클릭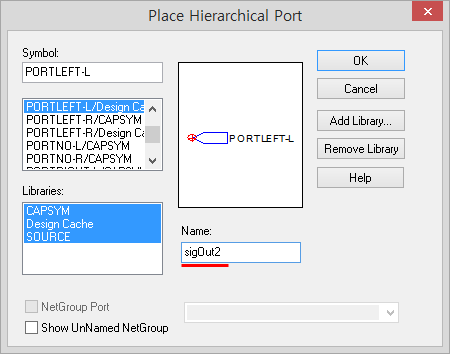
아래와 같이 작업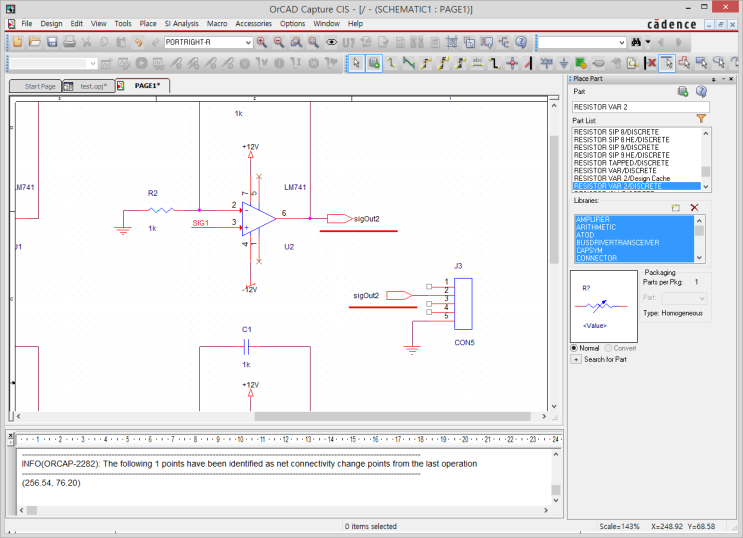
'*.opj' 탭 -> '*.dsn' 선택 -> 'Tools' -> 'Annotate...' 선택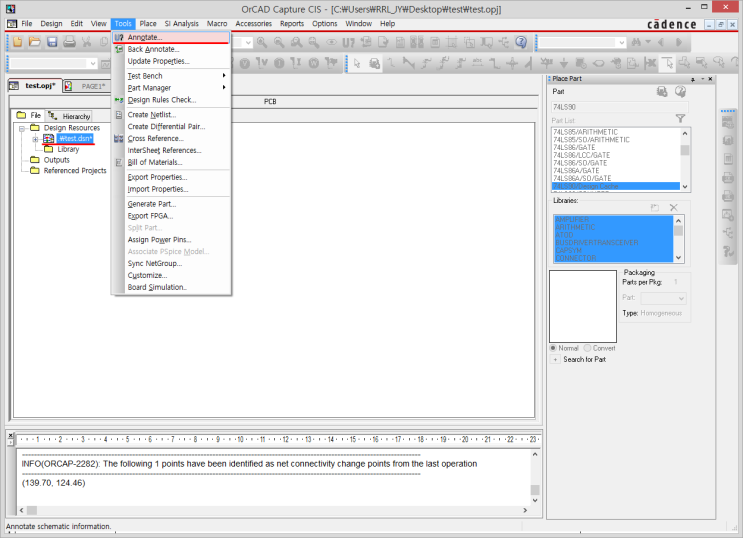
'Action' -> 'Reset part references to "?" 선택 -> '확인' 선택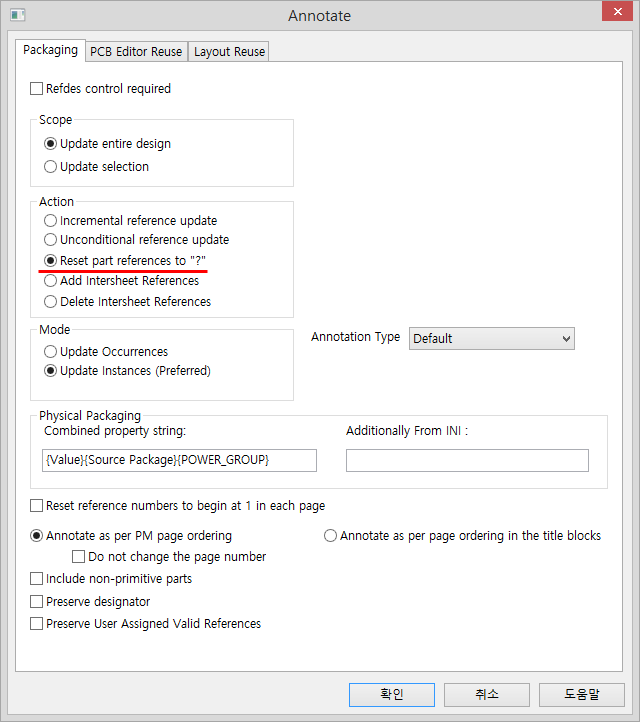
아래와 같이 reference "?"로 초기화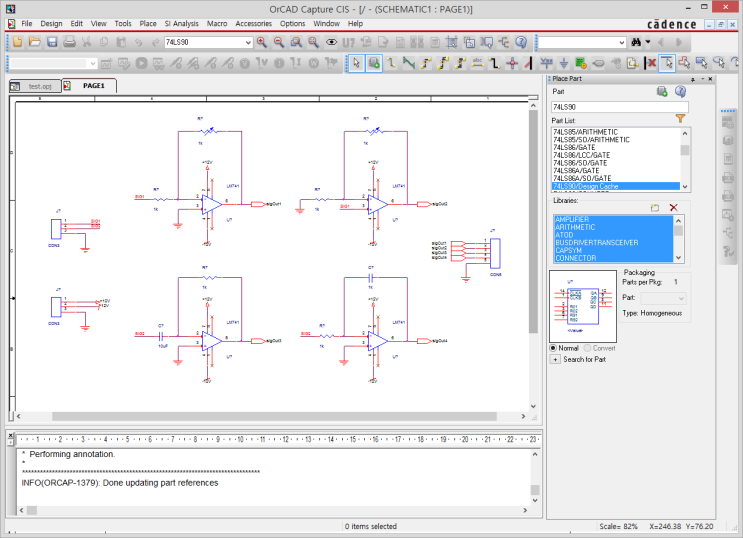
적절하게 reference 지정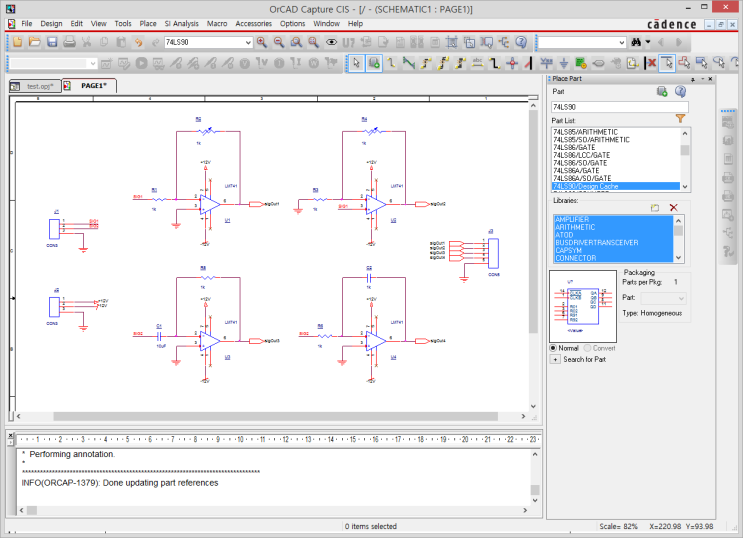
6) Footprint 작업
'*.opj' 탭 -> '*.dsn' 우클릭 -> 'Edit Object Properties' 선택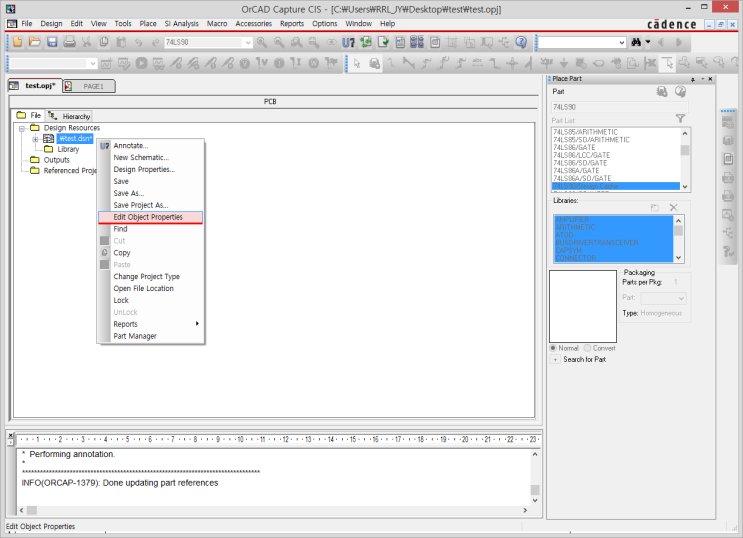
PCB Footprint | Part |
DIP8_3 | LM741, LF355, LF356, NE555 |
DIP14_3 | 74LS90, 4011, 4013, 74LS04 |
DIP16_3 | 4538 |
CON2 | JUMPER2 |
CON3 | JUMPER3 |
CON4 | JUMPER4 |
DO41 | DIODE, DIODE ZENER |
RES400 | RESISTOR |
RESADJ | RESISTOR VAR |
CAPCK05 | CAP NP |
CAP196 | CAP POL, LED |
TO92 | NPN ECB, JFET N SGD |
TO220AB | LM7812, LM7912 |
'PCB Footprint' 열의 적절한 내용 입력 -> 'New Property...' 선택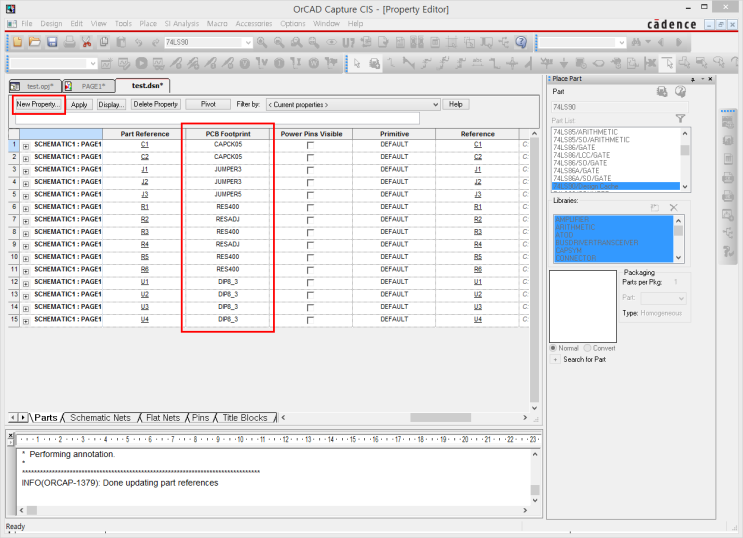
'Name' -> 'NC' 입력 -> 'OK' 선택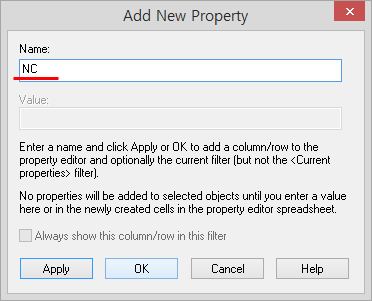
풋프린트상 연결하지 않는 핀 번호 'NC' 열에 입력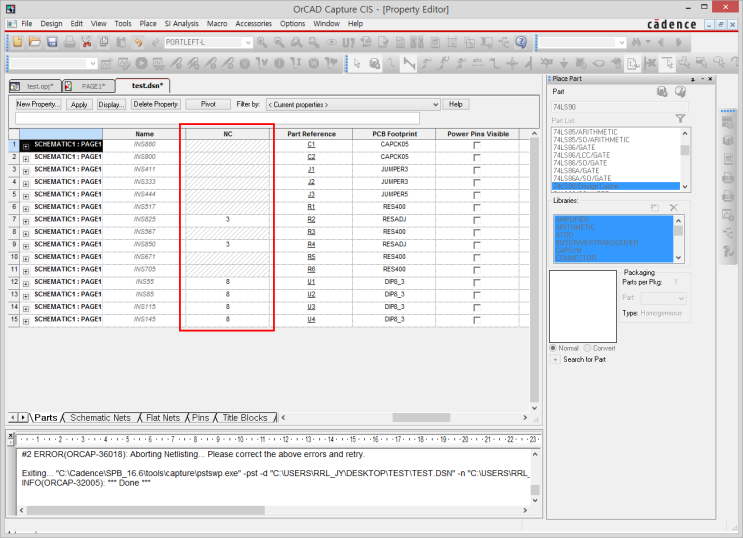
7) 설계 규칙 검사
'*.opj' 탭 -> '*.dsn' 선택 -> 'Tools' -> 'Design Rules Check...' 선택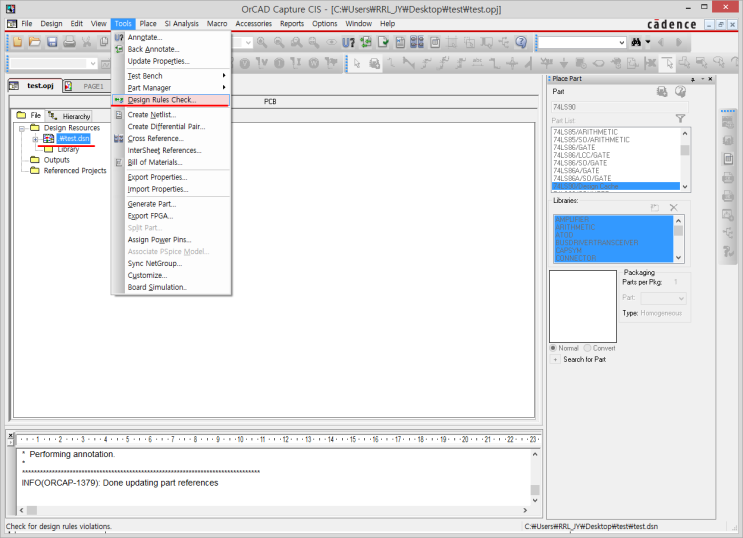
'Design Rules' -> 'View Output' 선택 -> '확인' 선택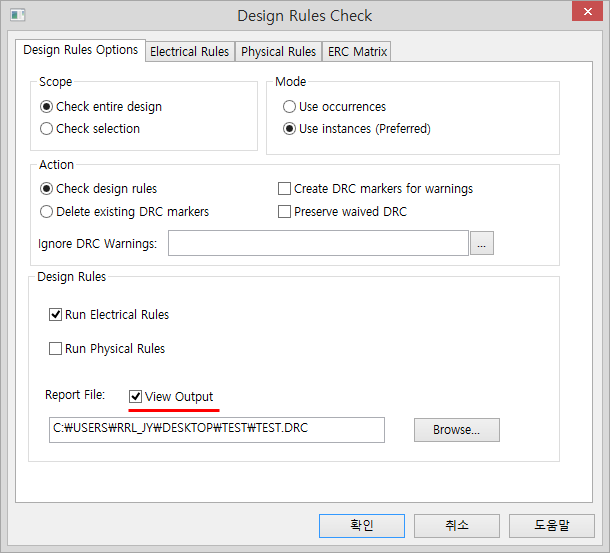
에러 확인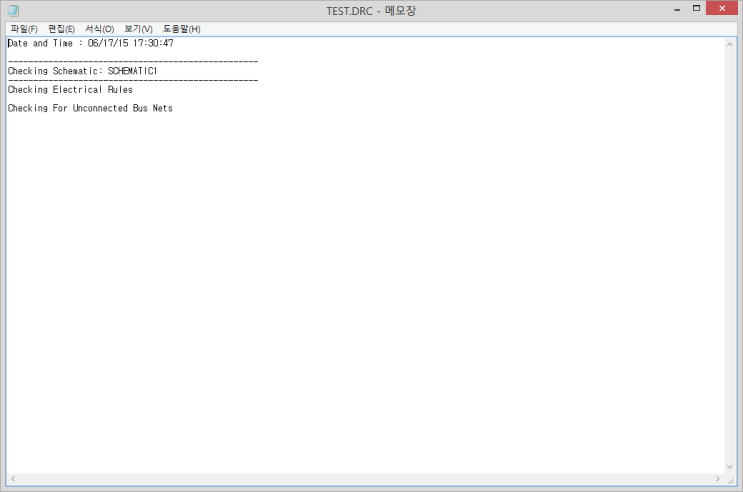
'*.opj' 탭 -> '*.dsn' 선택 -> 'Tools' -> 'Create Netlist...' 선택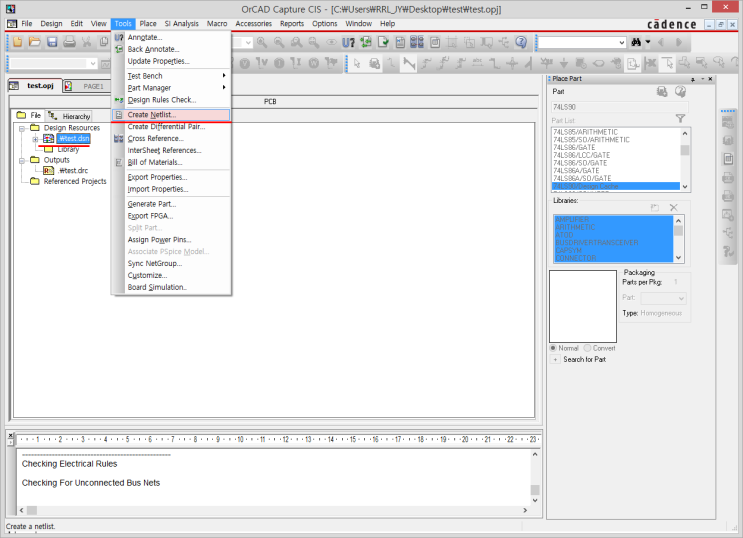
'Create or Update PCB Editor Board (Netrev)' 선택,
'Options' -> 'Board Launching Option' -> 'Open Board in OrCAD PCB Editor' 선택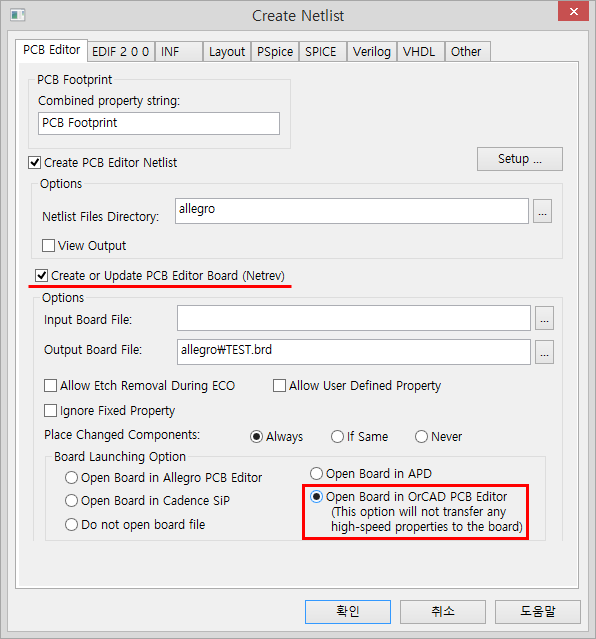
생성된 파일 확인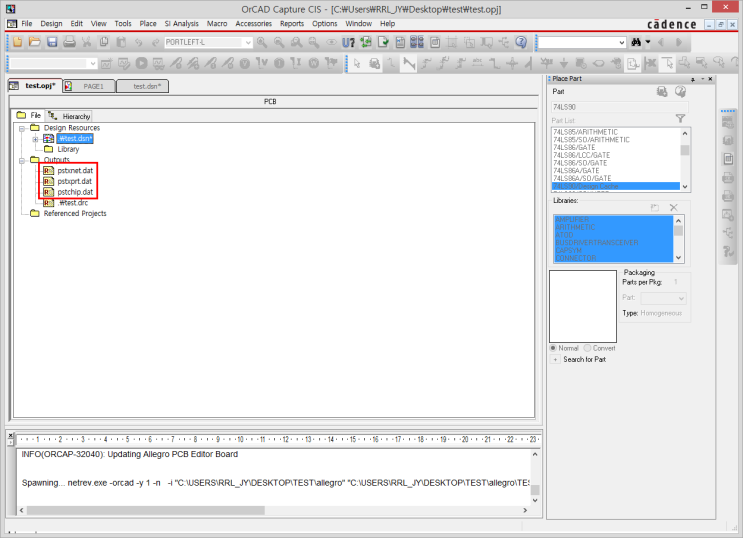
'Study > 전자캐드기능사' 카테고리의 다른 글
| 전자캐드기능사 풋프린트 Artwork (0) | 2021.01.25 |
|---|