반응형

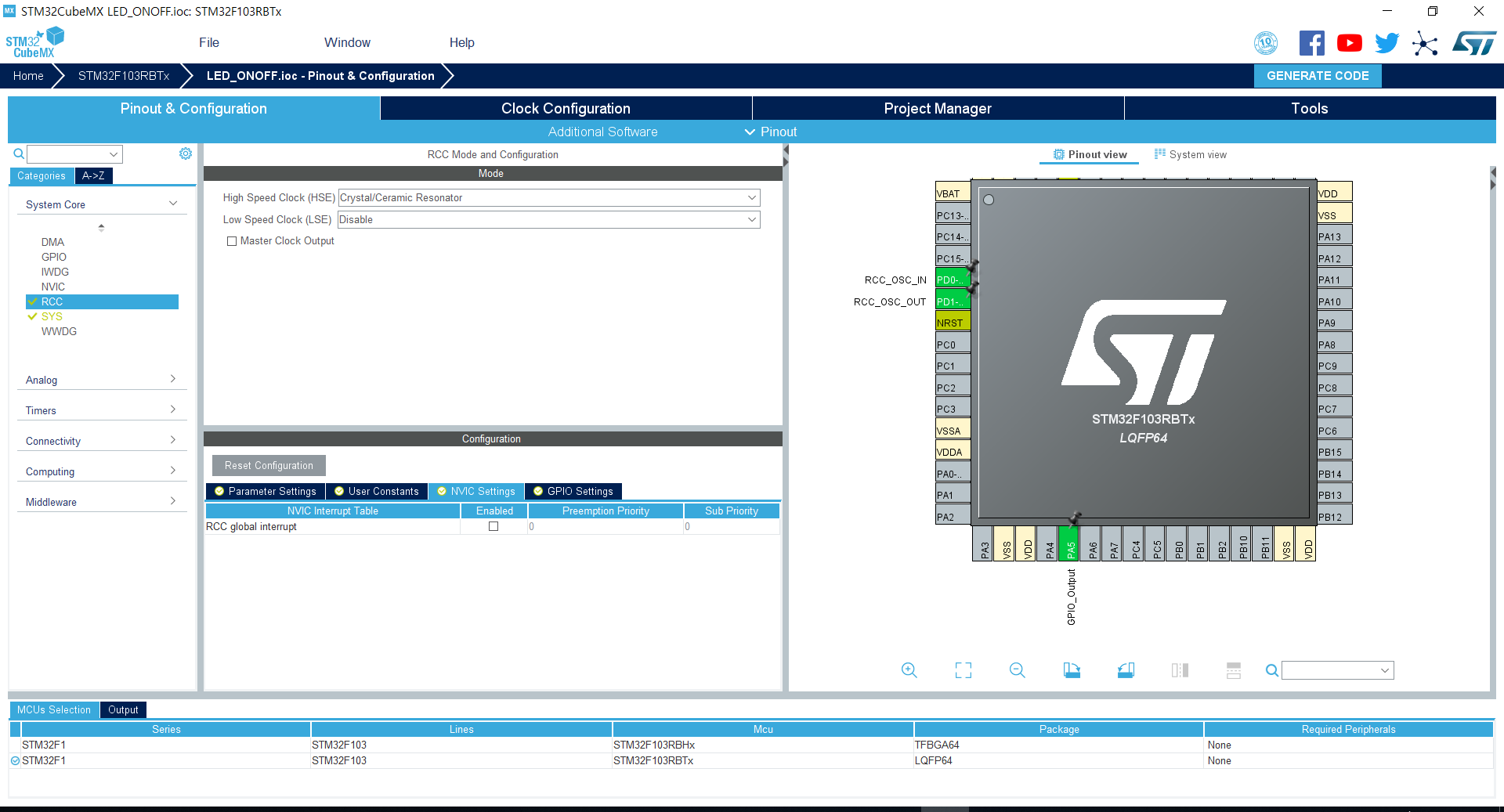
<CUBE MX 설정>
* Joystick : JOY_A, JOY_B, JOY_C, JOY_D, JOY_CTR, JOY_COM=GND, JOY_CTR
* LED : PD12, PD13, PD14, PD15
* Switch : KEY_USER, KEY_WAKEUP
* 동작원리 : Joystick이 Active low 일 때, LED On, JOY_CTR은 Enter 역할
/**
******************************************************************************
* File Name : main.c
* Description : Main program body
******************************************************************************
*
* COPYRIGHT(c) 2022 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f4xx_hal.h"
#include "gpio.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void Error_Handler(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
/* A - LED1 */
if(HAL_GPIO_ReadPin(JOY_A_GPIO_Port, JOY_A_Pin) == GPIO_PIN_RESET)
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_SET);
else
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_RESET);
// ex) GPIO A포트의 JOY_A Pin이 Low면 LED ON
/* B - LED2 */
if(HAL_GPIO_ReadPin(JOY_B_GPIO_Port, JOY_B_Pin) == GPIO_PIN_RESET)
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_SET);
else
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET);
/* C - LED3 */
if(HAL_GPIO_ReadPin(JOY_C_GPIO_Port, JOY_C_Pin) == GPIO_PIN_RESET)
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_SET);
else
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_RESET);
/* D - LED4 */
if(HAL_GPIO_ReadPin(JOY_D_GPIO_Port, JOY_D_Pin) == GPIO_PIN_RESET)
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_SET);
else
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_RESET);
/* PRESS - LED1 LED2 LED3 LED4 */
if(HAL_GPIO_ReadPin(JOY_CTR_GPIO_Port, JOY_CTR_Pin) == GPIO_PIN_RESET ||
HAL_GPIO_ReadPin(KEY_WAKEUP_GPIO_Port, KEY_WAKEUP_Pin) == GPIO_PIN_RESET ||
HAL_GPIO_ReadPin(KEY_USER_GPIO_Port, KEY_USER_Pin) == GPIO_PIN_RESET)
//JOY_CTR(enter)가 Low일때, KEY_WAKREUP, KEY_USER가 Low일 때,
{
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_SET);
}
else
{
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_RESET);
}
}
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = 16;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
Joystick, KEY Switch제어 시 LED가 켜지는 코드
반응형
'Project > Open407V-C' 카테고리의 다른 글
| Open407V-C Timer 인터럽트(Timer 84hz Clock) (0) | 2022.06.13 |
|---|---|
| OPEN407V-C TIMER 기본 동작 (0) | 2022.04.01 |
| OPEN407V-C EXIT 외부 인터럽트 (0) | 2022.03.31 |
| OPEN407V-C UART, Printf 제어 (0) | 2022.03.30 |
| Open407V-c package B (0) | 2022.01.06 |