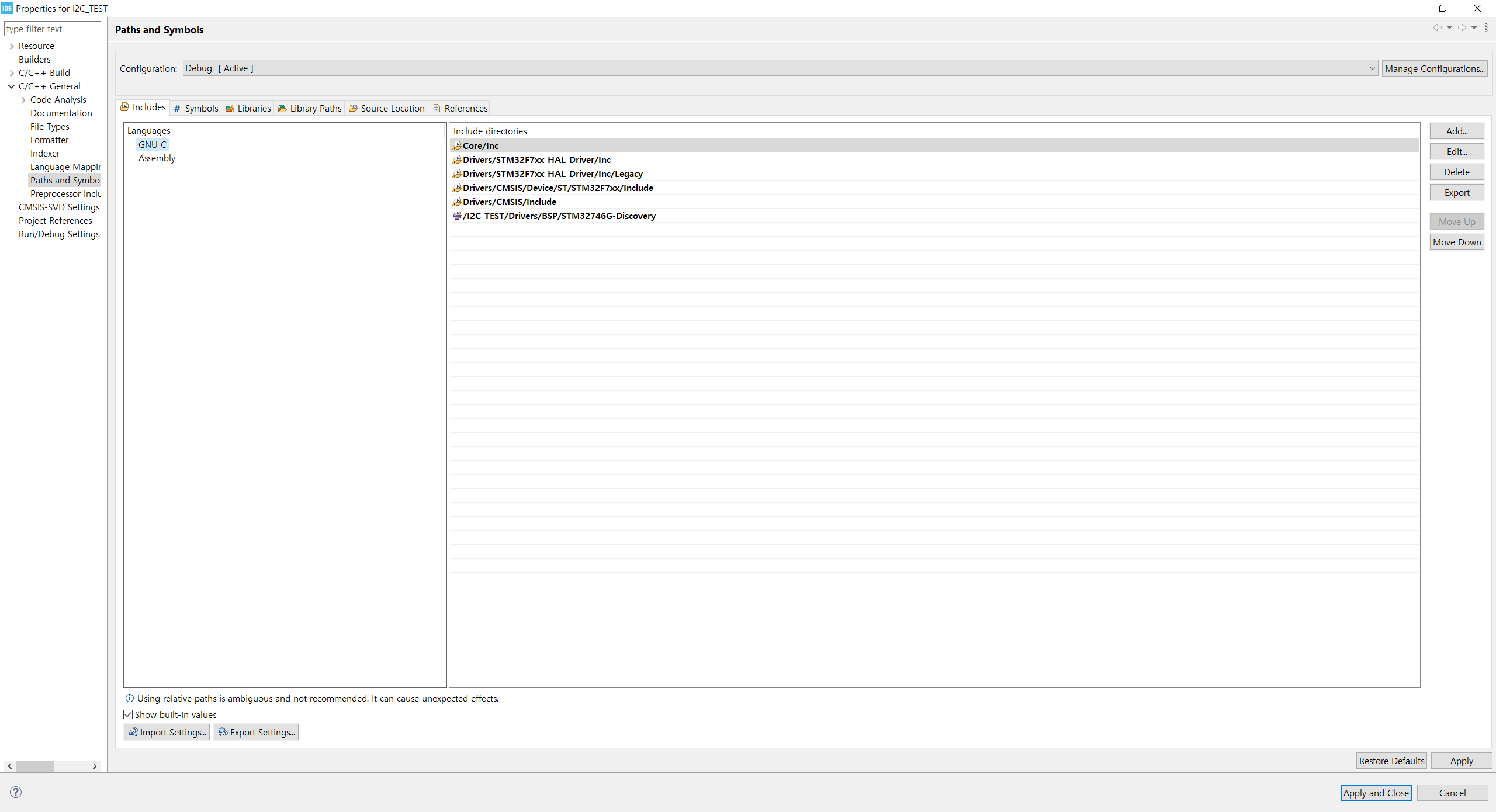
CubeMX에서 RCC,SYS,I2C3,USART1,FMC,DMA2D,LTDC Active
Cube MX 파일 첨부
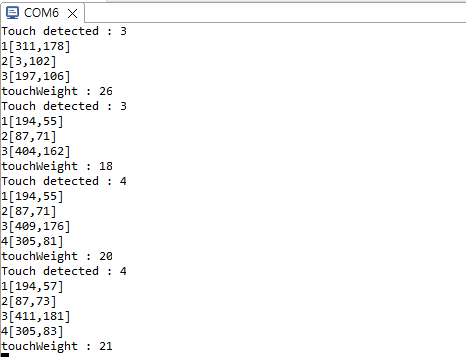
Touch 시 좌표 LCD 출력
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include "stm32746g_discovery.h"
#include "ft5336.h"
#include "rk043fn48h.h"
#include "stm32746g_discovery_lcd.h"
#include "stm32746g_discovery_ts.h"
#include "fonts.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
DMA2D_HandleTypeDef hdma2d;
I2C_HandleTypeDef hi2c3;
LTDC_HandleTypeDef hltdc;
UART_HandleTypeDef huart1;
SDRAM_HandleTypeDef hsdram1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C3_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_DMA2D_Init(void);
static void MX_LTDC_Init(void);
static void MX_FMC_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE{
if (ch == '\n') HAL_UART_Transmit(&huart1, (uint8_t*)"\r", 1, 0xFFFF);
HAL_UART_Transmit(&huart1, (uint8_t*)&ch, 1, 0xFFFF);
return ch;
}
TS_StateTypeDef TS_State;
static uint32_t x = 0, y = 0;
uint8_t buffer_str[50]={0,};
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C3_Init();
MX_USART1_UART_Init();
MX_DMA2D_Init();
MX_LTDC_Init();
MX_FMC_Init();
/* USER CODE BEGIN 2 */
BSP_LCD_Init();
BSP_LCD_LayerDefaultInit(LTDC_ACTIVE_LAYER, (uint32_t)LCD_FB_START_ADDRESS);
BSP_LCD_SelectLayer(LTDC_ACTIVE_LAYER);
BSP_LCD_DisplayOn();
BSP_LCD_Clear(LCD_COLOR_WHITE);
BSP_TS_Init(480, 272);
BSP_LCD_SetBackColor(LCD_COLOR_WHITE);
BSP_LCD_SetTextColor(LCD_COLOR_BLACK);
BSP_LCD_SetFont(&Font20);
BSP_LCD_DisplayStringAt(0,150, (uint8_t*)"TEST1", CENTER_MODE);
BSP_LCD_SetFont(&Font16);
BSP_LCD_DisplayStringAt(0,180, (uint8_t*)"TEST2", CENTER_MODE);
BSP_LCD_SetFont(&LCD_DEFAULT_FONT);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
BSP_TS_GetState(&TS_State);
if(TS_State.touchDetected)
{
x = TS_State.touchX[0];
y = TS_State.touchY[0];
sprintf(buffer_str, "X=%d ",x);
BSP_LCD_DisplayStringAt(0,50, (uint8_t*)buffer_str, LEFT_MODE);
memset(buffer_str,0,50);
sprintf(buffer_str, "Y=%d ",y);
BSP_LCD_DisplayStringAt(0,100, (uint8_t*)buffer_str, LEFT_MODE);
memset(buffer_str,0,50);
}
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure LSE Drive Capability
*/
HAL_PWR_EnableBkUpAccess();
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 400;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_6) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief DMA2D Initialization Function
* @param None
* @retval None
*/
static void MX_DMA2D_Init(void)
{
/* USER CODE BEGIN DMA2D_Init 0 */
/* USER CODE END DMA2D_Init 0 */
/* USER CODE BEGIN DMA2D_Init 1 */
/* USER CODE END DMA2D_Init 1 */
hdma2d.Instance = DMA2D;
hdma2d.Init.Mode = DMA2D_M2M;
hdma2d.Init.ColorMode = DMA2D_OUTPUT_ARGB8888;
hdma2d.Init.OutputOffset = 0;
hdma2d.LayerCfg[1].InputOffset = 0;
hdma2d.LayerCfg[1].InputColorMode = DMA2D_INPUT_ARGB8888;
hdma2d.LayerCfg[1].AlphaMode = DMA2D_NO_MODIF_ALPHA;
hdma2d.LayerCfg[1].InputAlpha = 0;
if (HAL_DMA2D_Init(&hdma2d) != HAL_OK)
{
Error_Handler();
}
if (HAL_DMA2D_ConfigLayer(&hdma2d, 1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN DMA2D_Init 2 */
/* USER CODE END DMA2D_Init 2 */
}
/**
* @brief I2C3 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C3_Init(void)
{
/* USER CODE BEGIN I2C3_Init 0 */
/* USER CODE END I2C3_Init 0 */
/* USER CODE BEGIN I2C3_Init 1 */
/* USER CODE END I2C3_Init 1 */
hi2c3.Instance = I2C3;
hi2c3.Init.Timing = 0x00C0EAFF;
hi2c3.Init.OwnAddress1 = 0;
hi2c3.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c3.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c3.Init.OwnAddress2 = 0;
hi2c3.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c3.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c3.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c3) != HAL_OK)
{
Error_Handler();
}
/** Configure Analogue filter
*/
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c3, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
{
Error_Handler();
}
/** Configure Digital filter
*/
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c3, 0) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C3_Init 2 */
/* USER CODE END I2C3_Init 2 */
}
/**
* @brief LTDC Initialization Function
* @param None
* @retval None
*/
static void MX_LTDC_Init(void)
{
/* USER CODE BEGIN LTDC_Init 0 */
/* USER CODE END LTDC_Init 0 */
LTDC_LayerCfgTypeDef pLayerCfg = {0};
/* USER CODE BEGIN LTDC_Init 1 */
/* USER CODE END LTDC_Init 1 */
hltdc.Instance = LTDC;
hltdc.Init.HSPolarity = LTDC_HSPOLARITY_AL;
hltdc.Init.VSPolarity = LTDC_VSPOLARITY_AL;
hltdc.Init.DEPolarity = LTDC_DEPOLARITY_AL;
hltdc.Init.PCPolarity = LTDC_PCPOLARITY_IPC;
hltdc.Init.HorizontalSync = 40;
hltdc.Init.VerticalSync = 9;
hltdc.Init.AccumulatedHBP = 53;
hltdc.Init.AccumulatedVBP = 11;
hltdc.Init.AccumulatedActiveW = 533;
hltdc.Init.AccumulatedActiveH = 293;
hltdc.Init.TotalWidth = 565;
hltdc.Init.TotalHeigh = 295;
hltdc.Init.Backcolor.Blue = 0;
hltdc.Init.Backcolor.Green = 0;
hltdc.Init.Backcolor.Red = 0;
if (HAL_LTDC_Init(&hltdc) != HAL_OK)
{
Error_Handler();
}
pLayerCfg.WindowX0 = 0;
pLayerCfg.WindowX1 = 480;
pLayerCfg.WindowY0 = 0;
pLayerCfg.WindowY1 = 272;
pLayerCfg.PixelFormat = LTDC_PIXEL_FORMAT_RGB565;
pLayerCfg.Alpha = 255;
pLayerCfg.Alpha0 = 0;
pLayerCfg.BlendingFactor1 = LTDC_BLENDING_FACTOR1_PAxCA;
pLayerCfg.BlendingFactor2 = LTDC_BLENDING_FACTOR2_PAxCA;
pLayerCfg.FBStartAdress = 0xC0000000;
pLayerCfg.ImageWidth = 480;
pLayerCfg.ImageHeight = 272;
pLayerCfg.Backcolor.Blue = 0;
pLayerCfg.Backcolor.Green = 0;
pLayerCfg.Backcolor.Red = 0;
if (HAL_LTDC_ConfigLayer(&hltdc, &pLayerCfg, 0) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN LTDC_Init 2 */
/* USER CODE END LTDC_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/* FMC initialization function */
static void MX_FMC_Init(void)
{
/* USER CODE BEGIN FMC_Init 0 */
/* USER CODE END FMC_Init 0 */
FMC_SDRAM_TimingTypeDef SdramTiming = {0};
/* USER CODE BEGIN FMC_Init 1 */
/* USER CODE END FMC_Init 1 */
/** Perform the SDRAM1 memory initialization sequence
*/
hsdram1.Instance = FMC_SDRAM_DEVICE;
/* hsdram1.Init */
hsdram1.Init.SDBank = FMC_SDRAM_BANK1;
hsdram1.Init.ColumnBitsNumber = FMC_SDRAM_COLUMN_BITS_NUM_8;
hsdram1.Init.RowBitsNumber = FMC_SDRAM_ROW_BITS_NUM_12;
hsdram1.Init.MemoryDataWidth = FMC_SDRAM_MEM_BUS_WIDTH_16;
hsdram1.Init.InternalBankNumber = FMC_SDRAM_INTERN_BANKS_NUM_4;
hsdram1.Init.CASLatency = FMC_SDRAM_CAS_LATENCY_3;
hsdram1.Init.WriteProtection = FMC_SDRAM_WRITE_PROTECTION_DISABLE;
hsdram1.Init.SDClockPeriod = FMC_SDRAM_CLOCK_PERIOD_2;
hsdram1.Init.ReadBurst = FMC_SDRAM_RBURST_DISABLE;
hsdram1.Init.ReadPipeDelay = FMC_SDRAM_RPIPE_DELAY_0;
/* SdramTiming */
SdramTiming.LoadToActiveDelay = 16;
SdramTiming.ExitSelfRefreshDelay = 16;
SdramTiming.SelfRefreshTime = 16;
SdramTiming.RowCycleDelay = 16;
SdramTiming.WriteRecoveryTime = 16;
SdramTiming.RPDelay = 16;
SdramTiming.RCDDelay = 16;
if (HAL_SDRAM_Init(&hsdram1, &SdramTiming) != HAL_OK)
{
Error_Handler( );
}
/* USER CODE BEGIN FMC_Init 2 */
/* USER CODE END FMC_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOG_CLK_ENABLE();
__HAL_RCC_GPIOJ_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOK_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOI_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */

참고 링크 : https://hnydiy.tistory.com/216
'Project > STM32F746G-DISCO' 카테고리의 다른 글
| STM32F746G TFT LCD 이미지 출력하기 (0) | 2023.02.13 |
|---|---|
| STM32F746G I2C Touchscreen 특정 좌표 (0) | 2023.02.13 |
| STM32F746G BSP 드라이버 적용방법 (TFT LCD) (0) | 2023.02.09 |
| STM32F746G USART 제어 (0) | 2023.02.09 |
| STM32F746G SDRAM 사용하기 (0) | 2022.08.24 |