1. CUBE MX SET
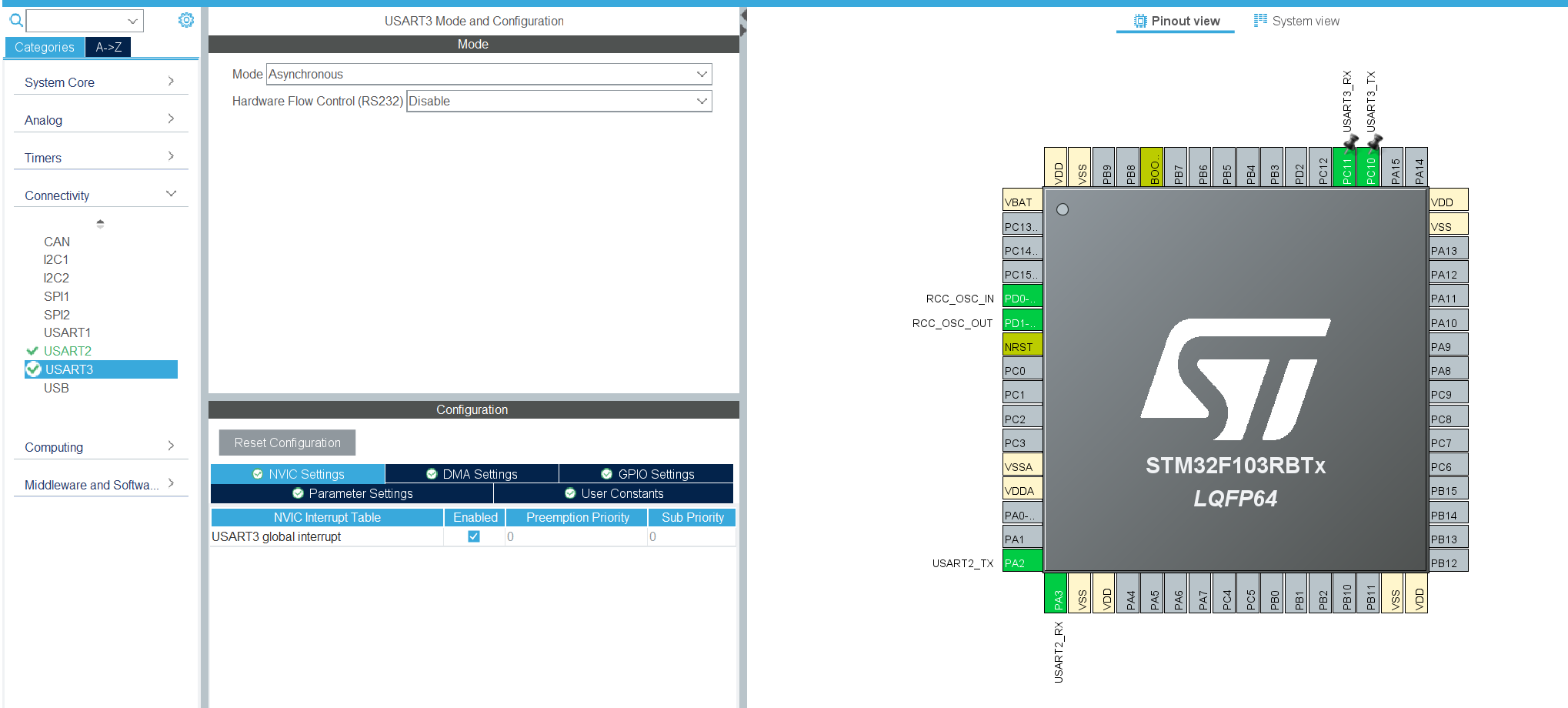
USART2 == Nucleo to PC 통신 (COM5)
USART3 == USB to Serial 장치 (COM7)
2. Source Code
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;
UART_HandleTypeDef huart3;
/* USER CODE BEGIN PV */
//Use printf
int _write(int fd, char *ptr, int len)
{
HAL_UART_Transmit(&huart2, (unsigned char*)ptr, len, HAL_MAX_DELAY);
return len;
}
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
static void MX_USART3_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//ringbuff init
uint8_t rx_buff[1024];
uint8_t rx_buff_temp=0;
uint8_t RX_BUFF_SIZE=0;
//uart3 Rx interrupt func
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
if(huart->Instance == USART3)
{
rx_buff[RX_BUFF_SIZE++]=rx_buff_temp;
if(RX_BUFF_SIZE >= 1024)
{
RX_BUFF_SIZE=0;
printf("rx_buff over Flow\r\n");
}
HAL_UART_Receive_IT(&huart3, &rx_buff_temp, 1);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_USART3_UART_Init();
/* USER CODE BEGIN 2 */
printf("hello\r\n");
//uart3 Rx intterupt enable
HAL_UART_Receive_IT(&huart3, &rx_buff_temp, 1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// if uart3 \r\n Receive, Uart2 transmit (debug)
if(RX_BUFF_SIZE != 0)
{
for(int i =0; i<RX_BUFF_SIZE; i++)
{
if(rx_buff[i-1] == '\r' && rx_buff[i]=='\n')
{
HAL_UART_Transmit(&huart2, rx_buff, RX_BUFF_SIZE, 100);
RX_BUFF_SIZE =0;
}
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI_DIV2;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL16;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* @brief USART3 Initialization Function
* @param None
* @retval None
*/
static void MX_USART3_UART_Init(void)
{
/* USER CODE BEGIN USART3_Init 0 */
/* USER CODE END USART3_Init 0 */
/* USER CODE BEGIN USART3_Init 1 */
/* USER CODE END USART3_Init 1 */
huart3.Instance = USART3;
huart3.Init.BaudRate = 115200;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART3_Init 2 */
/* USER CODE END USART3_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
3.동작 결과
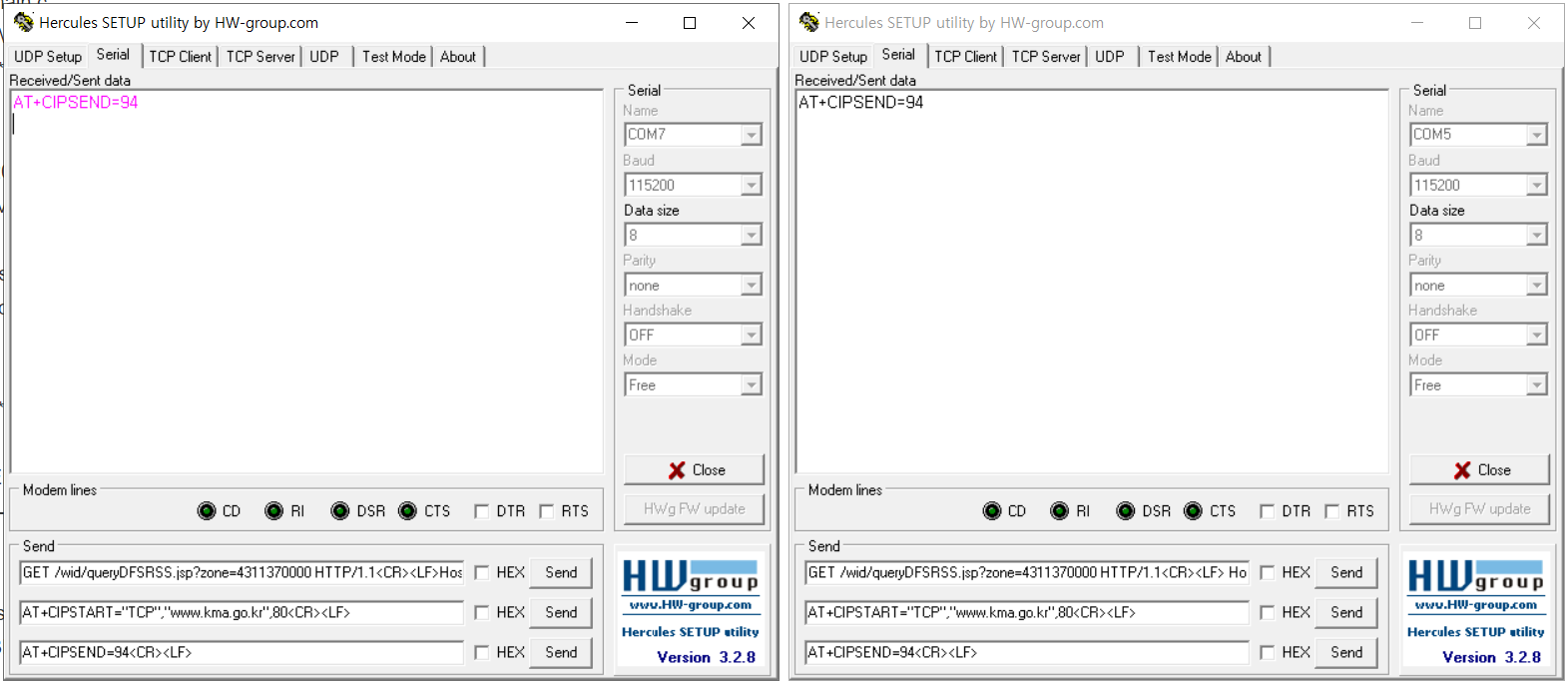
COM7 에서 UART3에 Transmit -> COM5 Uart2에 Receive
4. 참고 링크 : https://blog.naver.com/PostView.naver?blogId=ajoo92&logNo=221540143478&parentCategoryNo=&categoryNo=&viewDate=&isShowPopularPosts=false&from=postView
'Project > Nucleo-F103RB' 카테고리의 다른 글
| Nucleo 103rb i2c Char LCD (0) | 2021.05.25 |
|---|---|
| Nucleo-F103RB Serial 통신3 (0) | 2019.05.27 |
| Nucleo-F103RB Serial 통신2 (0) | 2019.05.21 |
| Nucleo-F103RB 시리얼통신 입력으로 제어 (0) | 2019.05.21 |
| Nucleo-F103RB Serial 통신1 (0) | 2019.05.21 |








